万隆蓄财-官媒直击-全国首个流形拓扑保持机器人世界模型在成都发布
科技日报记者 刘侠
5月14日,记者从成都人形机器人创新中心获悉,该中心正式发布中国首个基于流形拓扑保持的机器人世界模型,旨在为机器人构建能深刻理解物理世界的高效“大脑”,摆脱传统AI模型的“像素化”感知局限,在复杂动态环境中实现快速、安全、可靠的决策与行动。
据悉,传统生成式架构的具身智能模型存在一定程度的“模型幻觉”,类似大语言模型答案的不确定性,给机器人任务执行带来极大安全隐患,同时无法理解真实物理规律,泛化能力不足。与之不同,世界模型是具备对物理世界理解和预测的全新架构,也是人形机器人技术收敛的最大可能方向。成都人形机器人创新中心作为最早投入世界模型核心技术研发的团队,已于2025年8月首发中国首个基于世界模型的机器人任务执行系统。
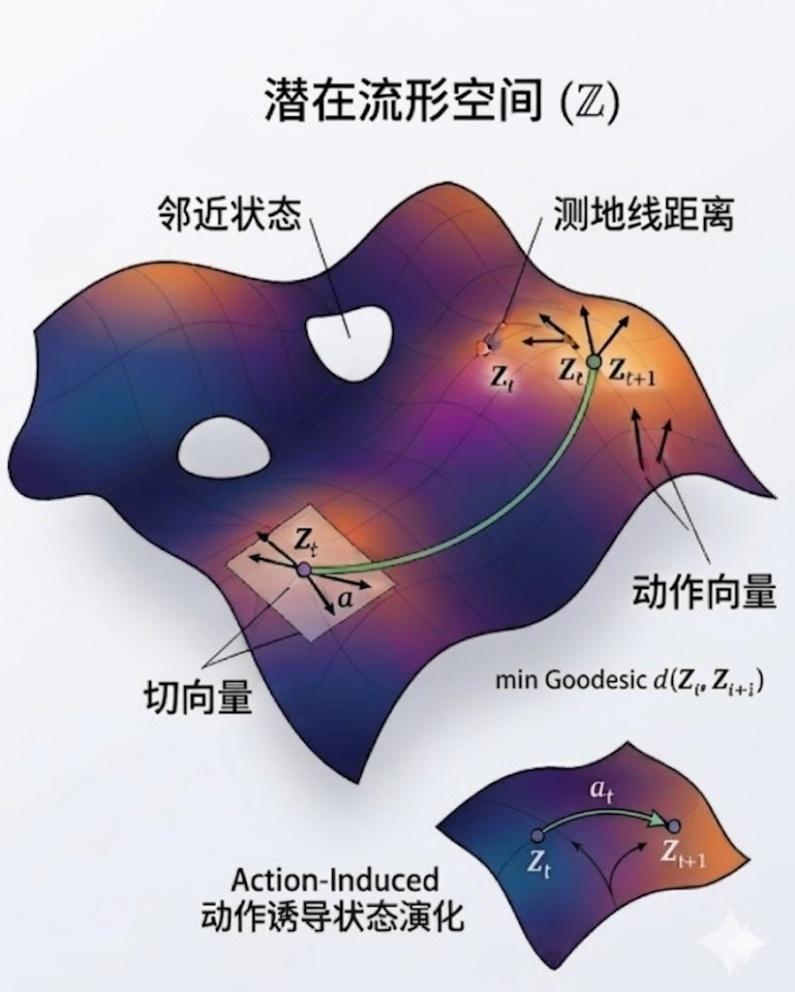
“流形-Manifold”概念是经典数学的重要分支,成都人形机器人创新中心在此基础上实现重大突破,通过流形实现对高维物理世界的状态描述映射到低维空间进行有效编码,使机器人在隐空间规划中严格符合自然界物理规律,不会出现VLA这类架构导致的物理碰撞、穿越、重叠等不符合自然规律的问题。
基于流形拓扑保持的世界模型,为通用人形机器人平台提供了一种跨形态、跨场景的底层表征范式。它将复杂的感知数据压缩为具备几何逻辑的精简表征,使得机器人无论是在黑暗狭窄的矿井执行巡检任务,还是在结构复杂的家庭环境中进行柔性协作,都能凭借这套拓扑一致的“心理地图”快速适应。这种模型不仅提升了强化学习的样本效率,更赋予了机器人物理意义上的泛化能力,即对空间结构本质的深刻理解。
记者了解到,未来,成都人形机器人创新中心将持续引领具身智能世界模型的核心技术突破,并推动其在机器人本体矩阵中的应用,让机器人更聪明,更能理解物理世界,真正实现走进千家万户。
风险提示:以上内容仅供参考和学习使用,不作为买卖依据,投资者应当根据自身情况自主做出投资决策并自行承担投资风险。市场有风险,投资需谨慎!
上述只摘职部分案例展示,不代表全部案例表现,案例仅以该反馈时间为准,历史案例不代表未来收益表现,案例仅供验证实力为主,不构成任何投资建议,据此操作风险自担,投资有风险,入市需谨慎。
免责声明:以上内容(包括但不限于图片、文章、音视频等)及操作仅供参考,我司为正规投资咨询经营机构,不指导买卖,不保证收益,投资者应独立决策并自担风险。